1. INTRODUCTION
The kinematic and diffusion wave models have found wide application in
engineering practice. Both are approximations to the unsteady open channel
flow phenomenon described by the complete Saint Venant equations. The
diffusion model assumes that the inertia terms in the equation of motion are
negligible as compared with the pressure, friction, and gravity terms. The
kinematic model assumes that inertia and pressure terms are negligible as
compared with the friction and gravity terms. Although approximate, both the
kinematic and diffusion models have been shown to be fairly good descriptions
of the physical phenomenon in a variety of cases. The kinematic model has
been successfully applied to overland flow, as well as to the description of
the travel of slow-rising flood waves. The subsidence of the flood wave, however,
is better described by the diffusion model since the kinematic model, by definition,
does not allow for subsidence. What do overland flow and slow-rising flood
waves have in common that they lend themselves to description by these
approximate models? The answer to this question is the subject of this paper.
2. WAVE PROPAGATION IN OPEN CHANNEL FLOW
Recently, two of the writers (4) have developed an analytical solution for
wave propagation in open channel flow, based on a linearized form of the
Saint Venant equations as presented by Lighthill and Whitham (3). They took
the linearized equations and sought a solution in sinusoidal form which led
to a system of homogeneous linear equations. The nontrivial condition for the
determinant of the coefficient matrix yielded the propagation celerity and
logarithmic decrement (5) of small sinusoidal perturbations to the equilibrium
flow, in terms of the steady equilibrium flow Froude number and a dimensionless
wave number of the unsteady component of the motion. In addition, Ponce
and Simons calculated the propagation celerity and logarithmic decrement
corresponding to the kinematic and diffusion wave models. As it will be shown
here, the findings of the theory can be used to determine limits for the applicability
of these approximate models, by comparing their propagation celerity and
logarithmic decrement with those of the complete Saint Venant equations. At
the outset, it is recognized that the validity of the theory is only as good as
the assumptions used in its formulation. For instance, the linearized equations
have been derived by neglecting second-order terms. Nevertheless, the findings
of the theory provide a good insight into the underlying physical mechanism,
and their validity as a first approximation appears beyond doubt.
3. DEFINITIONS
The following definitions are advanced: uo = steady uniform flow mean velocity;
do = steady uniform flow depth; So = bed slope; L = wavelength of sinusoidal
perturbation to steady equilibrium flow; T = wave period of sinusoidal perturbation
to steady equilibrium flow; c = wave celerity; Lo = reference channel
length; Fo = steady uniform flow Froude number; σ*= dimensionless wave number
of the unsteady component of the motion; and τ* = dimensionless wave period
of the unsteady component of the motion, such that
in which g = gravitational acceleration.
The propagation celerity c can be expressed in dimensionless form by dividing it by uo.
The logarithmic decrement δ (5) is defined as follows:
in which αo and α1 = the wave amplitudes at the beginning and end of one wave period, respectively.
Two of the writers (4) have shown that for the dynamic model (that based
on the complete Saint Venant equations), the dimensionless propagation celerity
c and logarithmic decrement δ are functions of Fo and σ* (see Appendix I).
In practice, however, it is desirable to express the space parameter σ* as a function of the time parameter τ*. Combining Eqs. 1, 4, 5, and 6:
Thus, by the use of Eq. 8, c* and δ may be expressed as a function of Fo and τ*.
Furthermore, the results of the theory suggest that for the comparison of diffusion and full dynamic models,
a more appropriate parameter is τ*/Fo. Making use of Eqs. 2, 3 and 5, τ*/Fo is expressed as follows:
or
4. KINEMATIC WAVE VERSUS DIFFUSION WAVE
The kinematic model breaks down when the neglect of the pressure term
is not justified. Accordingly, it is of interest to compare the kinematic and
diffusion models. Both models have a propagation celerity equal to 1.5 times
the equilibrium flow velocity. They differ, however, in the attenuation. The
logarithmic decrement of the kinematic model is 0, i.e., the kinematic model
does not allow for physical attenuation. The attenuation often observed in
numerical schemes based on the kinematic model is of an artificial nature
(numerical damping due to truncation errors) (1).
Substituing Eq. 8 into Eq. 11:
Since:
it follows that:
The kinematic model will be valid when the attenuation factor of the diffusion model, e δd ,
is close
For example, for a channel with So = 0.0001, do = 10 ft (3.05 m) and uo = 3 fps (0.91 m/s), an accuracy of at least 95% in the wave amplitude after one propagation period requires that the period T be:
If water discharge and channel friction are given, uo and do can be calculated
by the use of the appropriate uniform flow formula (Manning or Chezy).
As another example, assume a value of slope So corresponding to overland flow.
If So = 0.01,
Thus, for mild channel slopes, the period has to be very long for the kinematic
model to apply (periods such as those of slow-rising flood waves). For steep
slopes such as those prevalent in overland flow, the period does not need to
be long. The steeper the slope, the shorter the period required to satisfy the
kinematic flow assumption. The conclusion is that most overland flow problems
can be modeled as kinematic flow. Likewise, slow-rising flood waves that travel
unchanged in form may also be modeled as kinematic flow.
An explanatory note is necessary here. The criteria of Table 1 are based on a comparison of the attenuation
(described by the logarithmic decrement δ) of the analytical solutions for the kinematic and diffusion models.
In a numerical solution, however, often the truncation errors may mask the nondiffusive character of the analytical
solution of the kinematic wave, with the result that the numerical solution of the kinematic wave may resemble the
analytical solution of the diffusion wave, further complicating the modeling (1).
5. DIFFUSION WAVE VERSUS DYNAMIC WAVE
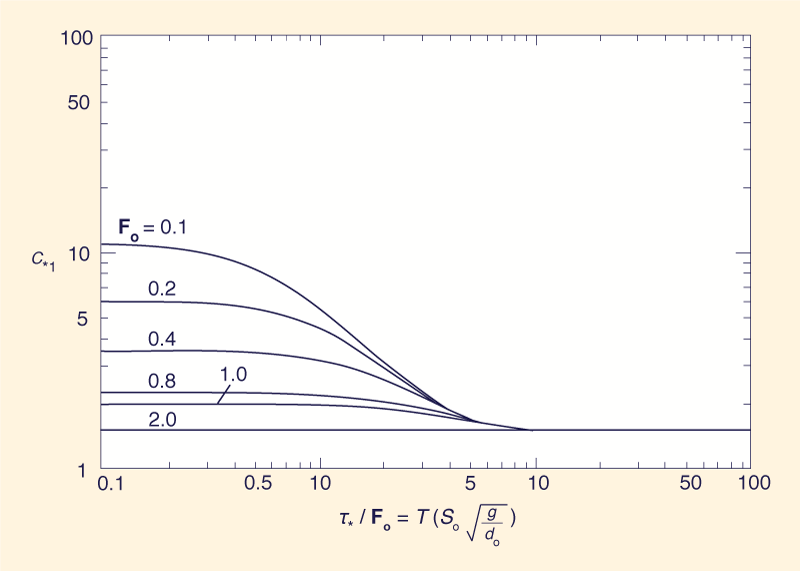
The next step in the analysis is to compare the propagation celerity c*d
and logarithmic decrement δd of the diffusion model with those of the full dynamic model. For Fo < 2,
the propagation celerity of the diffusion wave, c*d = 1.5,
is a lower bound for the dynamic celerity. Since only the primary dynamic wave (that which travels downstream) is of interest here, the dynamic wave
celerity will be referred to as c*1.
Figure 1 shows the variation of c*1 as a function of
τ*/Fo. It can be seen from this
figure that c*1 tends
to c*d as τ*/Fo
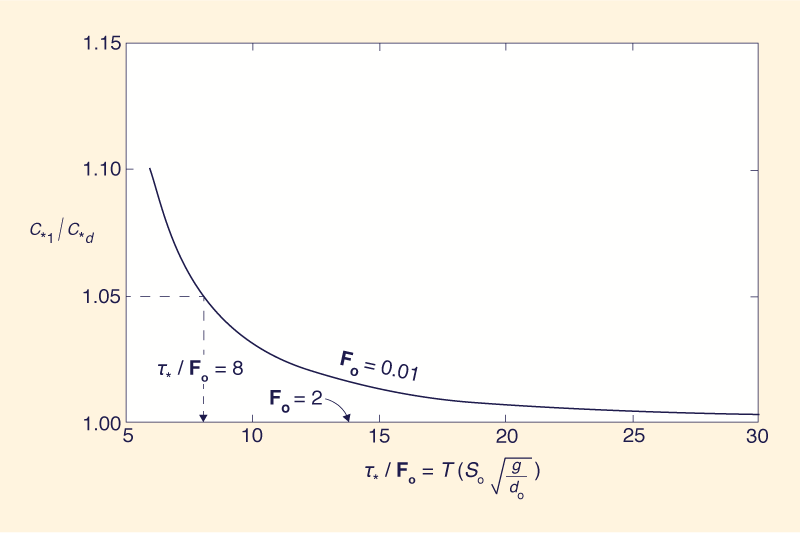
increases, for all Fo. Figure 2 is an arithmetic plot
of c*1/c*d
versus τ*/Fo for
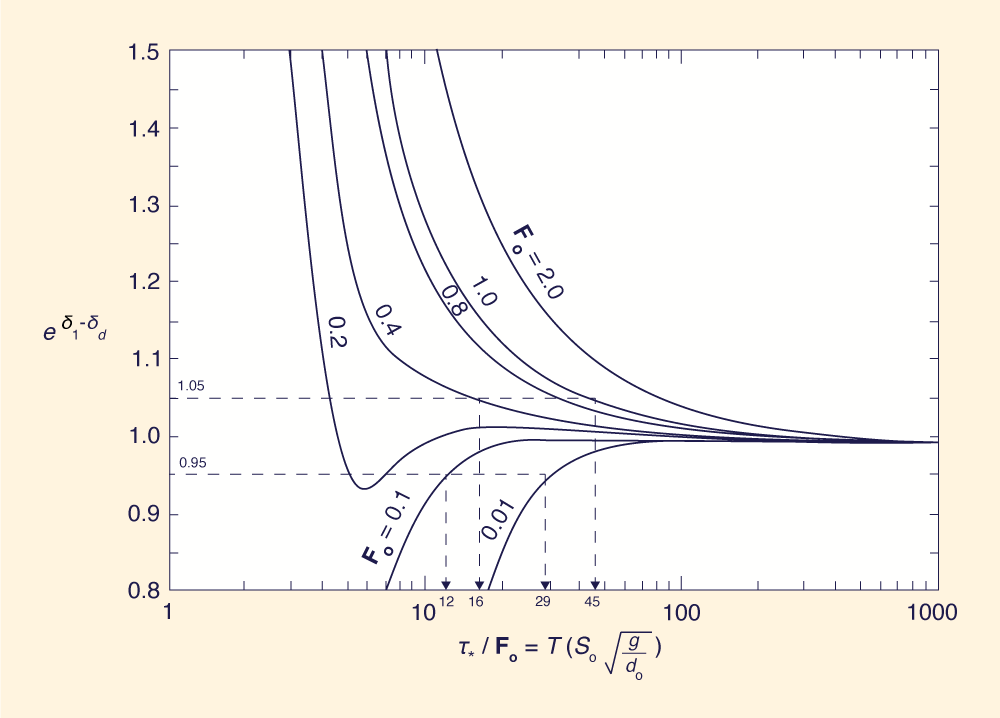
Keeping the celerity error to within 5% does not guarantee that the amplitude error will remain within the same tolerance. Figure 3 is a plot
of e δ1 - δd versus
τ*/Fo,
in which δ1 and δd are the logarithmic decrements of the dynamic and
diffusion models, respectively. Figure 3 shows that for
Applying this criterion to the same example used before, for So = 0.0001 and do = 10 ft (3.05 m):
from which:
In the second example shown, for So = 0.01 and do = 1 ft (0.305 m):
On the basis of the examples shown, it is concluded that the diffusion model applies for a wider range of slopes and periods than the kinematic model, with the added advantage that the diffusion model does allow for physical attenuation. However, if inequality (Eq. 17) is not satisfied, the diffusion model breaks down and only the full dynamic model can properly account for the rate of travel and amount of attenuation of the wave.
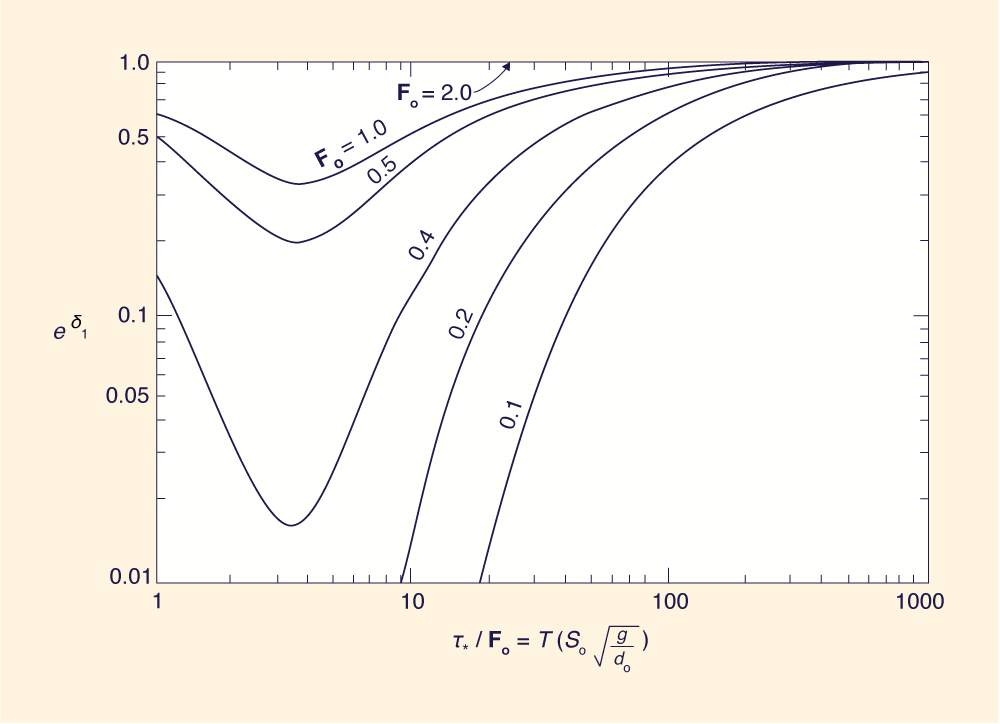
6. FULL DYNAMIC MODEL
Figures 1 and 4 show c*1 and eδ1 as a function of Fo
and τ*/Fo, respectively. For τ*/Fo
≤ 30, i.e., the range where only the full dynamic model would apply,
very strong attenuation is shown.
7. CONCLUSIONS
The applicability of the kinematic and diffusion models is assessed by comparing
the propagation characteristics of sinusoidal perturbations to the steady uniform
flow for the kinematic, diffusion, and dynamic models (the dynamic model
is that based on the complete Saint Venant equations).
It is shown that bed slope and wave period (akin to wave duration in waves
of shape other than sinusoidal) are the important physical characteristics in
determining the applicability of the approximate models. Larger bed slopes or
long wave periods will satisfy the inequality criteria. The diffusion model is shown to be applicable for a wider range of bed slopes and wave periods than the kinematic model. Where the two models break down, only the dynamic model will simulate the physical phenomena. The dynamic model, however, is shown to have markedly strong dissipative tendencies. This conclusion has had ample corroboration in the literature.
ACKNOWLEDGEMENTS The writers wish to acknowledge the United States Environmental Protection Agency, Environmental Research Laboratory, Athens, Georgia, and the United States Department of Agriculture Forest Service, Rocky Mountain Forest and Range Experiment Station, Flagstaff, Arizona, for sponsoring this study.
APPENDIX I. EQUATIONS FOR PROPAGATION CELERITY c* AND LOGARITHMIC DECREMENT δ The equations for c* and δ of the complete dynamic model are the following:
in which A = (1/Fo2) - B 2; B = 1/(σ*Fo2); C = (A 2 + B 2)1/2; D = [(C + A)/ 2]1/2; and
APPENDIX II. REFERENCES
APPENDIX III. NOTATION The following symbols are used in this paper:
αo = wave amplitude at beginning of period; α1 = wave amplitude at end of period; c = wave celerity. Eq. 1; c* = dimensionless wave celerity, Eq. 6; do = steady uniform flow depth; Fo = steady uniform flow Froude number; g = acceleration of gravity; L = wavelength; Lo = reference channel length, Eq. 2; So = bed slope; uo = steady uniform flow mean velocity; T = wave period; δ = logarithmic decrement, Eq. 7; τ* = dimensionless period, Eq. 5; and σ* = dimensionless wave number, Eq. 4.
Subscripts 1 = pertaining to primary dynamic wave (traveling downstream); d = pertaining to diffusion model; and k = pertaining to kinematic model.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 211225 |
| Documents in Portable Document Format (PDF) require Adobe Acrobat Reader 5.0 or higher to view; download Adobe Acrobat Reader. |