WHAT CAUSES WAVE ATTENUATION?
Professor Emeritus of Civil and Environmental Engineering
San Diego State University, San Diego,
California
1. INTRODUCTION
In unsteady open-channel flow, several types of waves may be construed for purposes
of analysis.
Some waves attenuate, i.e., diffuse, decay, or dissipate; others do not.
The question is: What condition causes waves to decay? Is it friction? Or is it
the
pressure gradient? Both of these terms have been regarded as responsible for the
wave attenuation observed in practice (Ponce, 2024).
In this article, we review the work of
Ponce (1982), who mathematically
identified the cause
of wave attenuation. To accomplish this objective,
he extended his solution for shallow wave propagation
(Ponce and Simons, 1977)
to track the occurrence of wave attenuation by successibly turning on/off the various terms of
the governing equations, particularly those of the equation of motion.
In this way, he was able to pinpoint the exact cause of wave attenuation.
2. NATURE OF WAVE ATTENUATION IN OPEN-CHANNEL FLOW
The presence of absence of wave attenuation in unsteady open-channel flow
is explained in Table 1.
This table has been prepared based on the findings of
Ponce (1982).
The occurrence of wave attenuation may be described or explained
with two analytical approaches: A and B.
The first approach (A) consists of the
exclusion of one or more terms in the governing equation of motion, leading to the formulation
of several wave types, or wave models: (1) kinematic wave;
Kinematic wave
The kinematic wave is formulated by neglecting the local acceleration, advective acceleration, and pressure
gradient terms of the
equation of motion (e = a = p = 0). The only term that remains is the
kinematic term (bottom friction and gravity) (k = 1). This wave model does not attenuate at all.
Diffusion wave The diffusion wave is formulated by neglecting the local and advective acceleration terms in the equation of motion (e = a = 0). The remaining terms are the pressure term (p = 1) and the kinematic term (k = 1). This wave model does attenuate, albeit a small amount. It is used in the modeling of the large majority of flood waves, characterized by a small dimensionless wave number (Hayami, 1951; Ponce, 2024a).
Unnamed wave The unnamed wave is formulated by neglecting the local acceleration and pressure-gradient terms in the equation of motion (e = p = 0). The remaining terms are the advective acceleration (a = 1) and the kinematic term (k = 1). This wave model attenuates (Ponce, 1982); however, it is not generally used in unsteady flow modeling because the neglect of only the local acceleration term (e = 0), while at the same time keeping the advective acceleration term (a = 1), is generally not warranted.
Mixed wave
The mixed wave is formulated by keeping all terms in the
equation of motion (e = a = p = k = 1).
Dynamic wave
The dynamic wave is formulated by neglecting the kinematic term (friction plus gravity) (k = 0),
while keeping the acceleration (local and advective) and pressure
gradient terms in the governing
equation of motion (e = a = p = 1).
This wave model does not attenuate at all. It is used in the
modeling of relative small waves,
characterized by a very large dimensionless wave number (Ponce, 2024a).
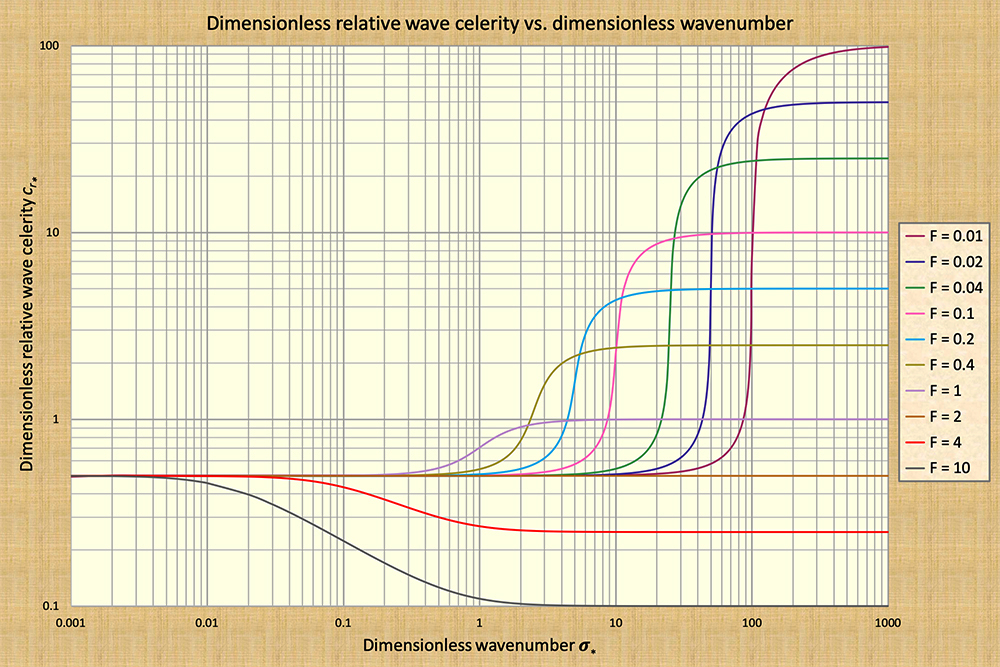
Overall assessment A plot of dimensionless relative wave celerity vs. dimensionless wavenumber across the spectrum of shallow-water waves is showm in Fig. 2. Kinematic waves lie to the left of the wavenumber domain; dynamic waves to the right. The avowed constancy of wave celerity depicts the absence of wave attenuation. Therefore, neither kinematic nor dynamic waves attenuate! Diffusion waves lie immediately to the right of kinematic waves (Fig. 2). They are subject to a small but appreciable attenuation. Since flood waves usually attenuate very little, diffusion waves are seen to be very applicable to the modeling of flood waves (Ponce, 2023c).
Mixed kinematic-dynamic waves, for short, mixed waves, lie towards the middle of the dimensionless wavenumber spectrum.
The sharpness of the variation in dimensionless relative
wave celerity with dimensionless wavenumber depicts
strong to very strong wave attenuation. [Note that peak attenuation occurs at the point of inflexion, i.e., where the second derivative
is equal to zero].
Figure 2 confirms the unsuitability of the mixed wave as a general basis for
flood wave computations. Indeed, the mixed waves are so dissipative
that they are not there for us to calculate them!
What term(s) is (are) directly responsible for wave attenuation?
The unnamed wave (e = p = 0; and a = k = 1),
which does attenuate (Table 1, Line A3),
is not used in practice. We conclude that, unless all terms are
included in the equation of motion
3. FREE-SURFACE STABILITY OR INSTABILITY
A second approach to study open-channel
flow wave attenuation has nothing to do with which terms are missing, or negligible, in the
governing equations (this approach is contained in Table 1, Part A). Instead, in this approach
all terms are present (Part B1), so that wave attenuation is not due to the presence or absence of
certain terms of the equation of motion. Indeed, in unsteady open-channel flow, waves
will attenuate or amplify depending on the value of the Vedernikov number V.
The latter is defined as the ratio
of relative celerity of kinematic waves v
to relative celerity of dynamic waves u:
In conclusion, open-channel flow waves will be subject to attenuation
when the Vedernikov number is
4. SUMMARY
The present article answers the question of what is the cause of wave attenuation in unsteady
In the modeling approach, four distinct models are recognized:
REFERENCES
Chow, V. T. 1959. Open-channel hydraulics. McGraw-Hill, New York, NY.
Craya, A. 1952. The criterion for the possibility of roll wave formation.
Gravity Waves, National Bureau of Standards Circular No. 521,
National Bureau of Standards, Washington, D.C. 141-151.
Hayami, I. 1951.
On the propagation of flood waves. Bulletin, Disaster Prevention Research Institute,
No. 1, December, Extract.
Lagrange, J. L. de. 1788. Mécanique analytique, Paris, part 2, section II, article 2, 192.
Ponce, V. M. and D. B. Simons. 1977.
Shallow wave propagation in open channel flow.
Journal of Hydraulic Engineering, ASCE, 103(12), 1461-1476.
Ponce, V. M. 1982.
Nature of wave attenuation in open channel flow.
Journal of the Hydraulics Division, ASCE, 108(HY2), February, 257-262.
Ponce, V. M. 1991a. New perspective on the Vedernikov number.
Water Resources Research, Vol. 27, No. 7, 1777-1779, July.
Ponce, V. M. 1992.
Kinematic wave modeling: Where do we go from here?
International Symposium on Hydrology of Mountainous Areas, Shimla, India, May 28-30.
Ponce, V. M. 2023a.
Why is the Muskingum-Cunge the best flood routing method?
Online article.
Ponce, V. M. 2023b.
The Vedernikov number.
Online article.
Ponce, V. M. 2023c.
When is the diffusion wave applicable?
Online article.
Ponce, V. M. 2024a.
Kinematic waves demystified.
Online article.
Ponce, V. M. 2024b.
Mixed kinematic-dynamic waves debunked.
Online article.
Seddon, J. A. 1900. River Hydraulics. Transactions, American Society of Civil Engineers, Vol. XLIII, 179-243, June; Extract: pages 218-223.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



| 240601 |